
 資訊
資訊目前,市面上大部分的移動機器人廠商都采用SLAM這種導航方式,相關技術和部件產品也已經成熟。SLAM的方式擺了此前移動機器人對外部環境的依賴,例如必須要安裝導軌、磁條、二維碼等輔助設備,這種方式約束了機器人的活動范圍,也不利于生產線的臨時調整。
SLAM的方式主要有兩種,一種是基于激光LiDAR傳感器的方式,激光LiDAR傳感器快速掃描周轉環境,然后生產地圖進行導航。另一種是視覺導航,利用攝像頭,對周邊的圖像進行采集,利用算法生成地圖和運行路徑。目前,兩種方式各有優劣,也有廠家采用多種傳感器的方式,實現更高級標準的導航。
視覺導航Visual SLAM
Visual SLAM即(vSLAM)是一種基于計算機視覺的技術,主要用于室內定位導航。原理是通過視覺攝像機拍攝周圍的圖像,然后計算出周圍環境的位置和方向,也就是對未知環境進行地圖構建,然后就可以幫助移動機器人導航。
視覺導航的優點是:攝像頭相對比較便宜,不需要承擔大量的成本。此外,通過圖像可以分辨出周邊物體的紋理,從而識別出人、動物或者其他物體對象。
不過,視覺在運算的過程需要大量的硬件資源,圖像占的儲存空間大,運算起來比較復雜,開發難度也比較大。此外,視覺傳感器容易受到光線的影響而產錯誤的影像,例如在較暗的環境下不容易識別環境。不過從成本來看,視覺的方式相對激光雷達的要低。
激光導航LiDAR SLAM
LiDAR SLAM的方式是通過多個激光傳感收發器照亮物體,從而測量到物體的距離,例如墻壁或椅子等。每個收發器快速發射脈沖光,并測量反射的脈沖以確定障礙的位置和距離。
光的傳播速度很快,所以需要高性能的激光傳感器才能成功測出目標的精確距離,因此,LiDAR成為一種快速而準確的方法。不過,如果使用2D LiDAR時,可能因為物體遮擋而信息丟失。雖然3D激光傳感器能夠解決這些問題,但成本十分昂貴。
總的來說,LiDAR更快,更準確,但成本也更高。而vSLAM更具成本效益,可以使用價格便宜的攝像頭,并具有3D地圖的潛力,但運行速度比激光要慢,精確上也不及激光。
無論視覺SLAM還是LiDAR SLAM,用戶都需要為SLAM系統配置可靠的運算平臺,以實現最佳性能。未來基于多傳感器的方式將會更適應于移動機器人,例如加上紅外、超聲等傳感器技術,可以進一步確保機器人在不同環境下能準確測量和計算出障礙物的距離。
那么問題來了,商用自主移動機器人和工業移動機器人到底差在哪里,為什么價格會相差這么大?
其實道理也很簡單,一部IPHONE手機和一部千元機的基礎功能在都相差無幾,但是價格差異十分懸殊。究其根本,是產品質量和研發技術上的差距。拋開具體功能不談,商用移動機器人和工業移動機器人在定位精度和運行穩定度及運行頻次、時長上的要求大有不同,這也就決定了兩類機器人在硬件屬性、軟件功能及算法運用的差異和不同。
商用移動機器人
商用機器人就拿咱們最常見的掃地機器人來說,目前市面上的掃地機器人多采用視覺SLAM的導航方式。掃地機器人系統通常由四個部分組成:移動機構、感知系統、控制系統和吸塵系統。移動機構是掃地機器人的主體,決定了機器人的運動空間,一般采用輪式機構。
感知系統一般采用超聲波測距儀、接觸和接近覺傳感器、紅外線傳感器和CCD攝像機等。可以看到,以上用與感知的設備成本想必工業移動機器人的激光雷達及配備的感知器、攝像機而言,成本相差數十倍。但是滿足掃地需求還是沒有問題的。主要保證機器人能夠在平面內移動。殼體前端和側面裝有紅外開關,作為碰撞檢測傳感器。底面的3個紅外開關作為臺階檢測傳感器,防止跌落。驅動輪上裝有光電編碼盤,可以對輪速進行檢測和控制,實現定位和路徑規劃。同時還擴展了超聲波傳感器,用于精確定位的需要;
隨著近年來計算機技術、人工智能技術、傳感技術以及移動機器人技術的迅速發展,掃地機器人控制系統的研究和開發已具備了堅實的基礎和良好的發展前景。掃地機器人的控制與工作環境往往是不確定的或多變的,因此必須兼顧安全可靠性、抗干擾性以及清潔度。用傳感器探測環境、分析信號,以及通過適當的建模方法來理解環境,具有特別重要的意義。近年來對智能機器人的研究表明,對于工作在復雜非結構環境中的自主式移動機器人,要進一步提高其自動化程度,主要依靠模式識別及障礙物識別、實時數據傳輸及適當人工智能方法,還需要進一步開發全局模型,從而為機器人獲取全局信息。
當然,在一些高精度要求的商業服務復雜場景,激光SLAM技術也有實戰的空間,價格也會跟著昂貴起來。它們已在餐廳、商場、酒店、銀行、醫院等各大服務場所中“嶄露頭角”,尤其在本次疫情抗擊中,激光SLAM自主移動機器人更是站上了“風口浪尖”。一時間醫護助理機器人、清潔消毒機器人、運輸配送等機器人出現在各個領域的前線,減少了人與人之間的近距離接觸,最大程度的保證了相關人員的安全。精細化構圖技術,可構建高精度、厘米級甚至毫米級(毫米級一般是工業標準)的地圖,具備超高分辨率,且不存在累加誤差。構建的地圖規則、精細,可直接使用,無需二次優化修飾,能直接滿足使用預期。在復雜多變,環境不受控制的應用場所(如醫院、商場、寫字樓等人流量大場所)行走時,可實時動態識別環境中的人或者移動障礙物,并進行靈活規避和路線規劃。
工業移動機器人
在工業領域,移動機器人已經成為一種驗證工廠自動化的標準和潮流。拋開SLAM技術不談,磁條和二維碼技術在工業和倉儲領域的使用由來已久,行業也積累了相當豐富的經驗。但隨著自動化水平的提高,工廠生產對產線的要求也趨于多樣化、多頻次、小周期。因此,產線靈活柔性的要求應運而生,SLAM技術剛好便可以解決這一需求。但是視覺SLAM在圖像處理中,邊緣銳化、特征提取等圖像處理方法計算量大,實時性差,對處理機要求高。另外,視覺測距法檢測不到玻璃等透明障礙物的存在,另外受視場光線強弱、煙霧的影響大。因此不作為主流使用,一般都是視覺傳感作為輔助搭配激光SALM進行工作。
不管是 Sick,倍加福,還是 Velodyne,價格從幾萬到幾十萬不等,成本相對來說比較高,但目前國內也有低成本激光雷達(RPLIDAR)解決方案。VSLAM 主要是通過攝像頭來采集數據信息,跟激光雷達一對比,攝像頭的成本顯然要低很多。但激光雷達能更高精度的測出障礙點的角度和距離,方便定位導航。
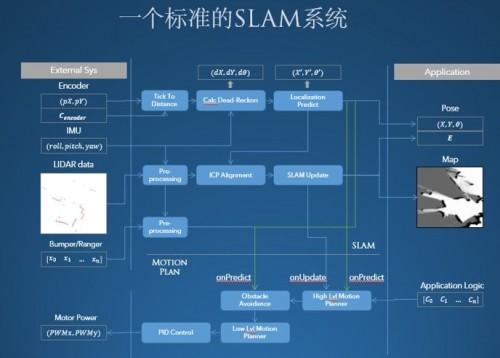
除配備激光雷達外,還需要機器人具有IMU(慣性測量單元)、里程計來為激光雷達提供輔助數據,否則SLAM系統也難以得到運行。總的來說,SLAM算法本身是一個對于外部系統有著多種依賴的算法,這是一個切實的工程問題。我們知道很多機器人,比如掃地機是不可能裝一個PC進去的。為了讓SLAM能在這類設備里運行,除了解決激光雷達成本外,還要對SLAM算法做出很好的優化。目前斯坦德機器人已經完美實現了各環節的自主研發和項目落地驗證,在業內激光SLAM技術上領跑各行。
斯坦德機器人作為專注于工業級移動機器人研發與生產的高新技術企業,實現了從機器人激光SLAM底層定位算法、操作系統、控制器等核心元素的自主研發全覆蓋,主要產品為激光SLAM導航AGV及其調度系統。致力于為優秀的系統集成商及終端制造工廠尋找標準化、可復制的算法應用場景,實現其柔性化、敏捷化的廠內物流需求,為客戶踐行輕資產、回報快的初期物流投入,為行業構建信息化、數據化的物流基礎設施,是全球真正踐行把激光導航AGV應用于華為、中興、富士康等實際工業物流領域的高科技企業。
7月3號至5號,斯坦德將攜主打產品亮相“2020慕尼黑上海電子生產設備展”。本次展會,還將有神秘產品亟待發布,首次在國內市場正式亮相!更多精彩,敬請期待!













