
 資訊
資訊
閉上眼,給你不一樣的感覺,現在AI人工智能軟體機器人可以給到你。
現在科技越來越發達,傳統機械化操作的機器人已經不能滿足現在人類快速的發展,隨著科技的不斷發展,科研人員通過自然界的軟體生物和傳統機器人的啟發,陸續有人創造出對人類快速發展的軟體機器人,他們可以去到很多人類去不到的地方,他們的身體柔軟度,給經濟帶來進一步的發展。
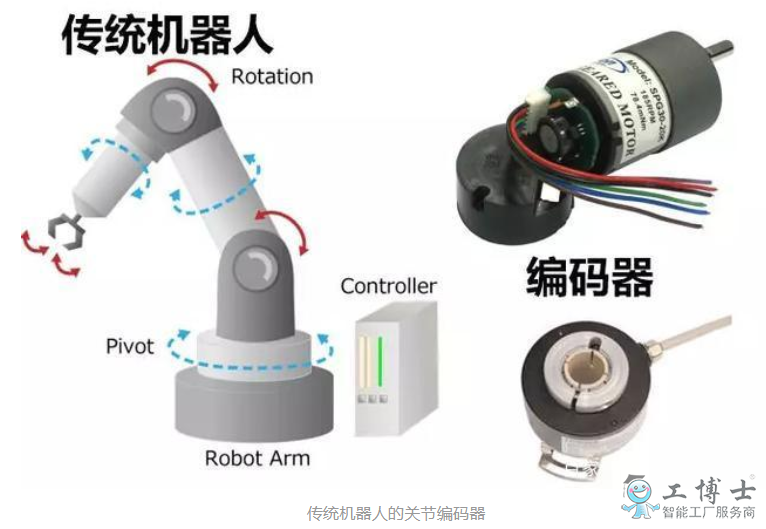
軟體機器人模仿章魚,象鼻,海星等動物而設計,栩栩如生,他們由軟材料(硅膠,橡膠)構成,有著天生優良的環境適應性以及安全交互性。但是相比于傳統機器人,軟體機器人的“感知”能力還遠遠不足。要真正做出“富有生命”的軟體機器人,有效的傳感是必不可少的。我們人類或者動物的肌肉纖維里纏繞著神經纖維,從而可以直接感知肌肉的變形,我們稱之為“本體感知能力”。
1. 軟體機器人的傳感
軟體機器人雖然適應性環境能力強,可以和人安全交互,但是為了能夠真正在生活生產中應用,能感知外界環境實為關鍵,有了傳感信息,機器人才能做出相應的對策,或者檢驗任務是否已經完成。毫不夸張的說,如果沒有有效的可靠的傳感方案,軟體機器人只能被限制在實驗室中做做展示了。
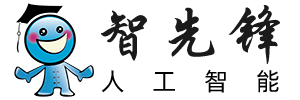
對于傳統機器人來說,機器人是由剛性的桿件和旋轉關節構成,用旋轉編碼器得到關節轉角就可以計算出來當前機器人的姿態。
但是軟體機器人而言,材料柔軟的特性讓軟體機器人本體的形狀變得極難預測,尤其是受到外力影響的情況下。科學家們已經設計出多種有效的軟體機器人傳感器(例如液態金屬,光纖,導電聚合物)。想要完全的表征一個軟體機器人的形變信息,僅僅依靠一兩條/片傳感器是比較難實現的,需要更復雜更科學的傳感器分布設計。目前的大多數研究都是根據經驗人為的對傳感器的分布進行設計,考慮到軟體機器人的“多自由度特性”的復雜性,人為的設計傳感器的尺寸和分布會越來越艱難。
來自迪士尼研究院(Disney Research)以及雷伊·胡安·卡洛斯大學(UniversidadRey Juan Carlos)的科學家們嘗試設計出一種傳感器系統來重構軟體機器人的本體,他們指出,傳感器的數量,以及放置傳感器的最佳位置是兩個重要的問題。研究者們提出了一種算法技術,可以由軟件自動地設計“拉伸型傳感網絡”的尺寸和分布,從而為任意形狀和尺寸的軟體機器人增加“本體感受”的能力。他們的方法已經能夠讓軟體機器人感受自身的變形狀態以及感受在外界交互下的形變。
在該研究中給出了三個具有本體感知能力的應用實例,一個長方體的彈性棒,一個氣動的軟體機械手指,還有一章魚觸手(只有仿真)。我們先來欣賞一下這幾種軟體機器人例子。
長方體棒展示
軟體手指展示
章魚觸手(仿真)展示
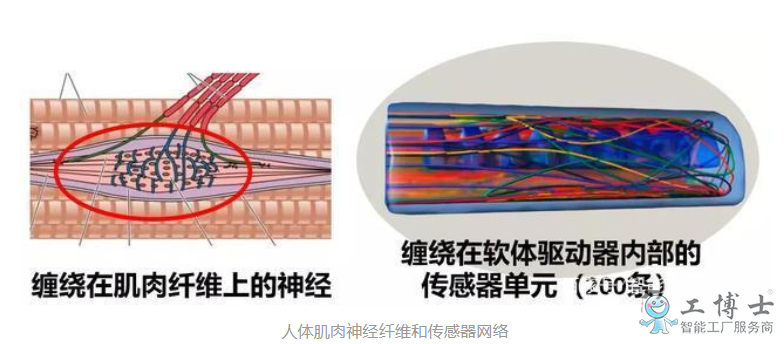
我們的肌肉纖維上纏繞了一圈圈的神經纖維,它們可以檢測肌肉的長度變化啊,從而讓我們感知身體每一處的姿勢。在這個研究中,科學家們采用了一種類似的設計方法,他們用一種常見的應變傳感器單元,這種傳感器是由彈性的空心硅膠管制成,在里面充滿了共晶鎵-銦(EGaIn,一種液態合金)。該傳感器的建模相對比較簡單,可以通過計算硅膠管長度/截面的變化來計算電阻的變化。研究者們把大量的這種細長的傳感器作為一個個類似于神經纖維的單元集成到軟體機器人身體里(通常是用硅膠澆注法,在后文中的氣動軟體驅動器中有介紹具體制造方法)。
彈性應變傳感器
2. 傳感器網絡優化的算法
為了讓大量的傳感器最優化分布,研究者們提出了一種用于優化應變傳感器分布和尺寸設計的算法。
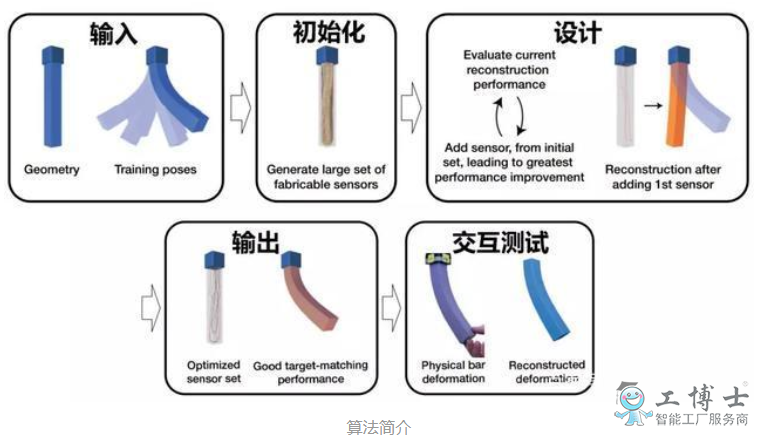
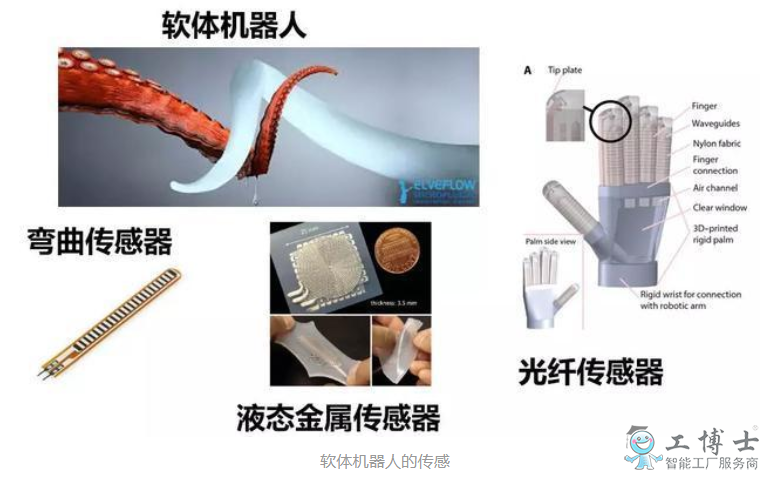
首先是要在計算機中設計出軟體機器人彈性體的幾何模型,然后利用這個模型進行一系列的不同形態的模擬交互訓練。接下來研究者根據交互訓練中彈性體的應變場分布(應變場分布有模擬交互得到)來生成一大組可以選擇的合理的傳感器路徑,這些傳感器路徑對于外界的輸入都非常敏感(研究者發現,在最開始集成200個候選傳感器足以在各個不同的方向表示物體)。接著通過連續迭代優化算法來選出最優的一組傳感器分布的方式,從而大量的減少傳感器的數量。最終根據得到的傳感器路徑來制造樣機進行測試。
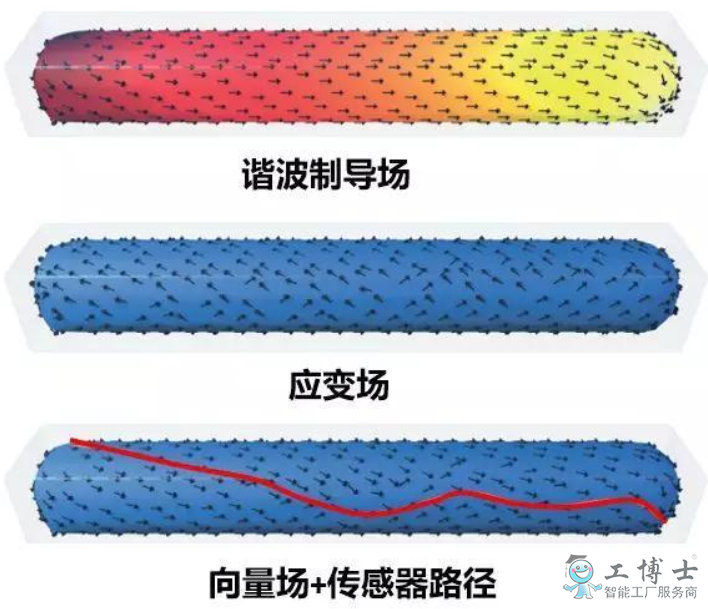
傳感器路徑的選擇
關于傳感器路徑的選擇,研究者制定了三個約束:1. 選擇的路徑一定要是可以被加工的;2. 路徑一定要有一定的隨機性;3. 每一個傳感器一定要跟隨著應變場,從而能夠最大化傳感器的敏感度。

傳感器數量篩選算法
為了從初始組合200個傳感器中篩選出最好的一組傳感器,研究者使用一階優化約束算法來實現傳感器最優組合的篩選。
3. 本體感知傳感器設計應用案例
如前面動態圖所展示的,作者通過兩個實體的例子和一個仿真的例子來展示他們算法的可行性。
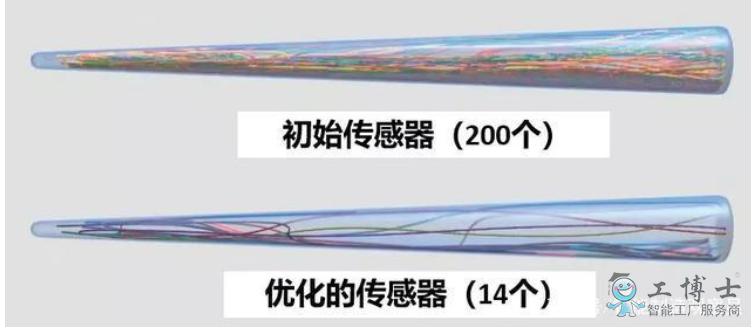
首先是一個可以多向彎曲的彈性棒。彈性棒的一被固定,另一端和外界有交互(用手指控制它朝著各個方向彎曲)。研究者利用算法把200個初始的傳感器網絡縮減到了只含有5個傳感器的最優組網絡分布。僅僅借助于這5個傳感器的信息,就可以重構該彈性棒在相應的外界作用下的變形情況,重構效果有著驚人的準確度。
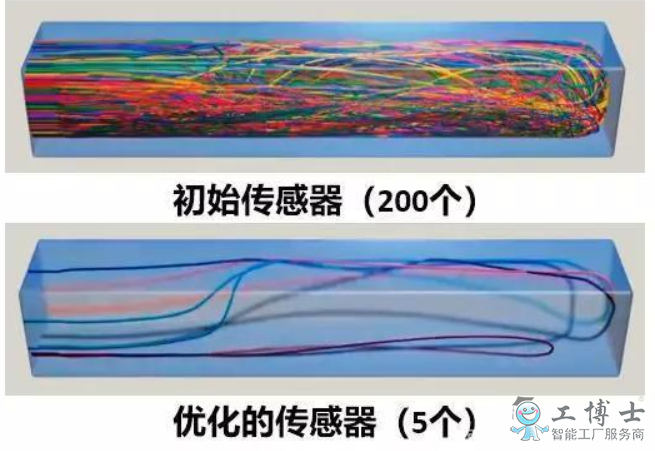
初始傳感器組和優化的傳感器組
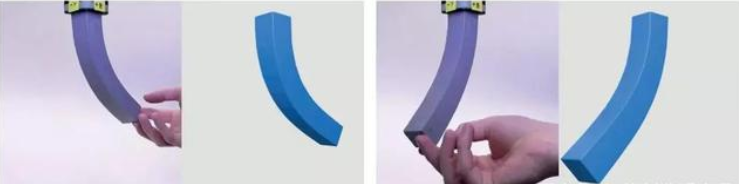
實體交互展示和對應的模型重構
除了簡單的實心的棒,有氣腔的復雜的氣動軟體驅動器也可以用這種方式來實現本體感知的效果。針對于一個常見的半圓形截面的氣動軟體手指,研究者先用算法在氣腔周圍生成了200個可制造的傳感器網絡,然后用優化模型縮減到僅剩9到10個傳感器網絡。
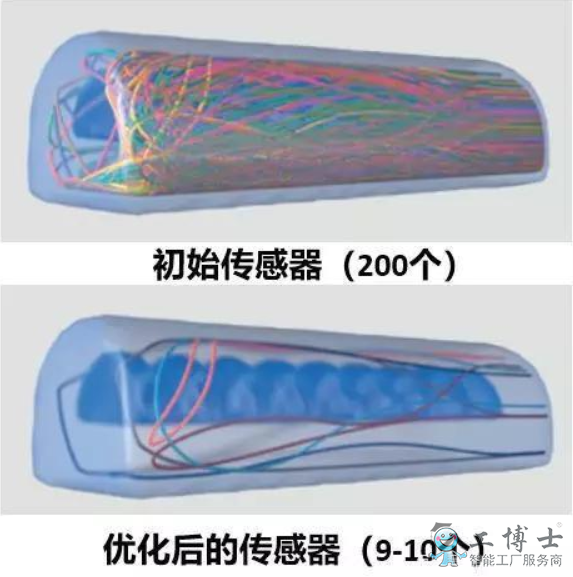
初始傳感器分布和優化后的傳感器分布
為了均衡制造難度和精確性,研究者們最終采用了6個傳感器的設計。下圖給出了集成傳感器的軟體機器人的制造方式。3d打印出傳感器網絡的模具,用硅膠鑄模的方式,在驅動器表明留下細小的凹槽,把空心硅膠管鑄進去,然后再鑄一層硅膠來固定空心硅膠管,最終在硅膠管里注入液態金屬,接上導線,即可得到一個“本體感知”的軟體驅動器。
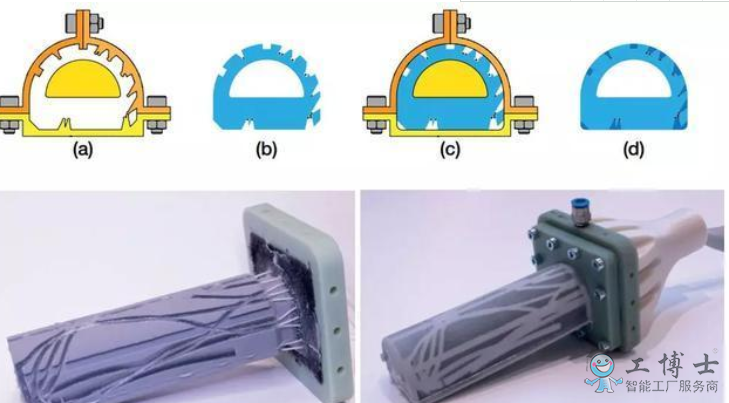
帶有本體感知能力軟體驅動器的加工
研究者用兩種不同的變形模式來檢驗本體感知的性能。一個是自由膨脹,另一個是在膨脹過程中受到圓柱體的阻擋。可以看出,圖中顯示了實體的變形和重構的模型有著良好的重疊性。
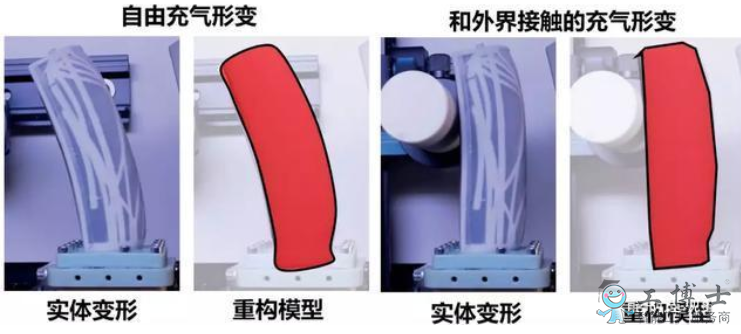
自由充氣形變和被阻擋的充氣形變
為了驗證所提出的方法也適用于仿生機器人設計,研究者仿真了一個章魚觸手。優化后的結果能夠準確的重構章魚觸手在復雜的外界接觸的模型(顏色代表模擬值和重構值之間的誤差)。
章魚觸手傳感器數量的優化
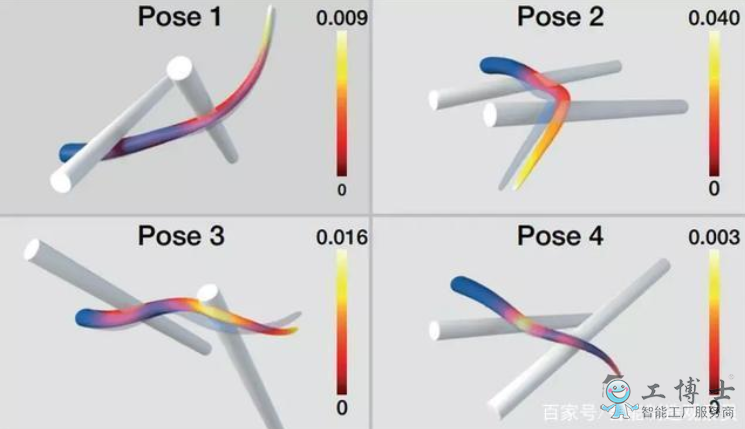
仿真模型和重構模型對比
4. 總結與展望
集成本體感知能力讓本來就具有眾多優良性能的軟體機器人變得更加強大。當一個軟體機械手具有了本體感知能力,它不僅僅能夠感知一個物體是否被抓起,更能夠直接感知所抓起物體的形狀。本研究中的科學家們提出的傳感器的設計及優化的方法能夠很好地重構軟體機器人的狀態,從而進一步提升了軟體機器人的可靠性以及實用性。能夠對于外界的交互進行感知,讓軟體機器人如虎添翼,相信在不久的將來,軟體機器人會逐步走入大家的生活。
軟體機器人已經有了進一步的突破,但目前還是有很多的不足需要改進,我相信,在未來的不斷研究中,可以創造出能像人一樣的軟體機器人。













