
 資訊
資訊生物進化過程是通過進化完善的遺傳程序為動物提供了身體形狀,使它們能夠在其主要類型的棲息地有效地移動。但這些適應性往往以在其他環境中的低效表現為代價。同樣,當工程師設計移動機器人時,他們傾向于在單一操作環境的基礎上選擇設備的結構和行為。其結果是固定的結構和行為,在一個環境中表現出色,但卻影響了機器人適應其他環境的能力。目前,移動機器人的擴散跨越生態監測、倉庫管理和極端環境探索,到個人消費者的家中。這種不斷擴大的應用前沿要求機器人在多個環境中運行,這是傳統機器人設計策略尚未有效解決的重大挑戰。
近日,耶魯大學Rebecca Kramer-Bottiglio教授課題組從陸生和水生烏龜身上得到的靈感,運用了"適應性形態發生"的設計策略,建造了一個機器人,它融合了傳統的剛性部件和軟性材料,從根本上增強了其四肢的形狀,并為多環境的運動改變了其步態。步態、肢體形狀和環境介質的相互作用證實了控制機器人運輸成本的重要參數。結果證明,自適應形態發生是提高移動機器人遇到非結構化、不斷變化的環境的效率的有力方法。相關成果以“Multi-environment robotic transitions through adaptive morphogenesis”為題發表在最新一期Nature上,并作為Nature封面。

作者認為,一個機器人可以通過"適應性形態發生"來實現跨環境運動的專業化:通過統一的結構和驅動系統來實現適應性形態和行為。為此,作者合并了水生和陸生運動的專門形態特征創造了兩棲機器人龜(ART)(圖1a)。通過一個單一的類似烏龜的身體計劃,ART通過刺激響應的軟材料和傳統的機器人組件的結合,采用了自適應的形態發生。使用可變剛度的復合材料(圖1b),在一系列步態的配合下,ART能夠在水下游泳,在水面上游泳,在各種基質上運動,以及在陸地和水之間過渡。
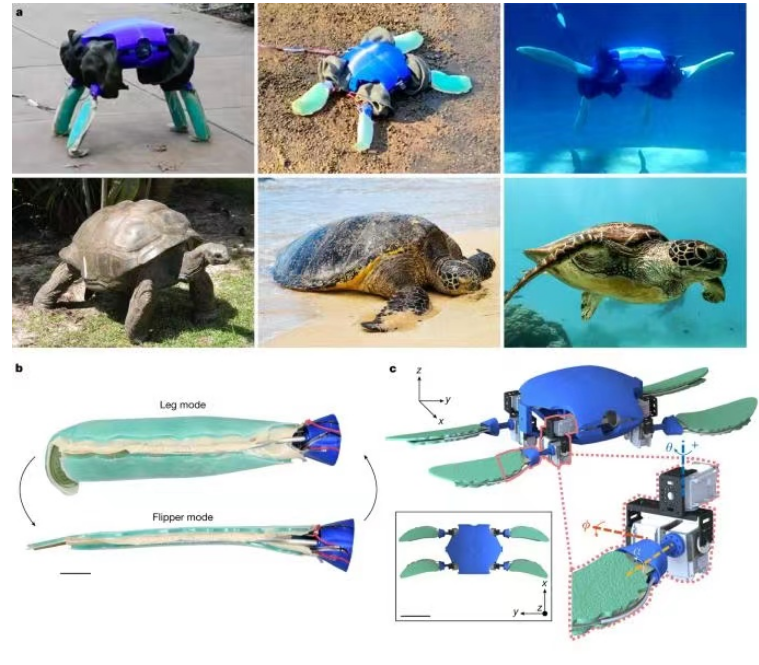
圖1:海龜啟發的兩棲機器人
ART的身體有一個變形肢體,能夠根據環境調整其硬度和形狀,完全集成到機器人結構中,以獲得測試的效率。身體包括四個子系統:底盤、外殼、肩關節和變形肢體。底盤容納電子元件,外殼提供流線型、用于浮力調整的壓載空間、有效載荷存儲和保護。肩部關節在運動學配置中各有三個馬達,以實現一系列的步態(圖1c)。由一對拮據的氣動執行器組成的變形肢體與粘附在熱固性聚合物上的應變限制層連接到每個肩關節。通過嵌入的加熱器加熱熱固性材料使其軟化,并給氣動推桿充氣,使肢體的橫截面積和硬度發生變化。這些變化使ART的肢體能夠在有利于行走的圓柱形幾何形狀和有利于游泳的平鰭幾何形狀之間進行適應性變形。在水中測試時,ART的浮力可調整為表面和水下游泳(圖2a)。隨著四肢變形為腳蹼模式,作者研究了劃水和拍打運動。劃水步態是一個相對于機器人身體向后的劃水動作,隨后是一個向前和向背的羽化恢復動作。拍打步態的特點是由連續的上沖和下沖組成的垂直運動輪廓。通過將ART固定在一個多軸負荷傳感器上獲得的向前(Fx)和向上(Fz)的方向力,闡明了劃水和最佳拍打步態之間的COT差異(圖2c,d)。Fx的圖表表明,在劃水步態的恢復部分產生了反作用力,導致ART明顯減速或向后移動(圖2c)。只有27%的劃水動作構成了生產性推力。在拍打步態的下沖過程中,ART也會減速,但在95%的沖程中保持有成效的Fx推力(圖2d)。

圖2:游泳
接著作者在瓷片、混凝土和花崗巖為代表室外城市環境的基質上評估了陸地運動策略。作者實施了一種靜態穩定的爬行步態,當爬行時,ART每次只有一個肢體離開地面,同時逐步轉動其身體向前移動(圖3a,b)。ART的左后肢遠端在不同基質上匍匐前進時的三維運動捕捉顯示了一致的掃動軌跡和步長,驗證了該步態的有效性(圖3c)。同時運動捕捉數據也幫助解釋不同基質的COT差異。Z軸數據投影(z*)包含(1)當ART擺動腿部進行踏步階段時的急劇增加),以及(2)與地形相互作用相應的振動特征(圖3d)。z軸數據在步態周期中的漂移表明ART行走時腿部逐漸伸展或收攏。作者計算了z軸數據與理想的、完全穩定的軌跡(z)的偏差,在這個過程中,ART的肢體將完全與地面接觸,COT和S之間的正相關關系強調了與基體保持無滑移接觸的重要性(圖3e),與基體有關的滑移可歸因于摩擦和地形特征。
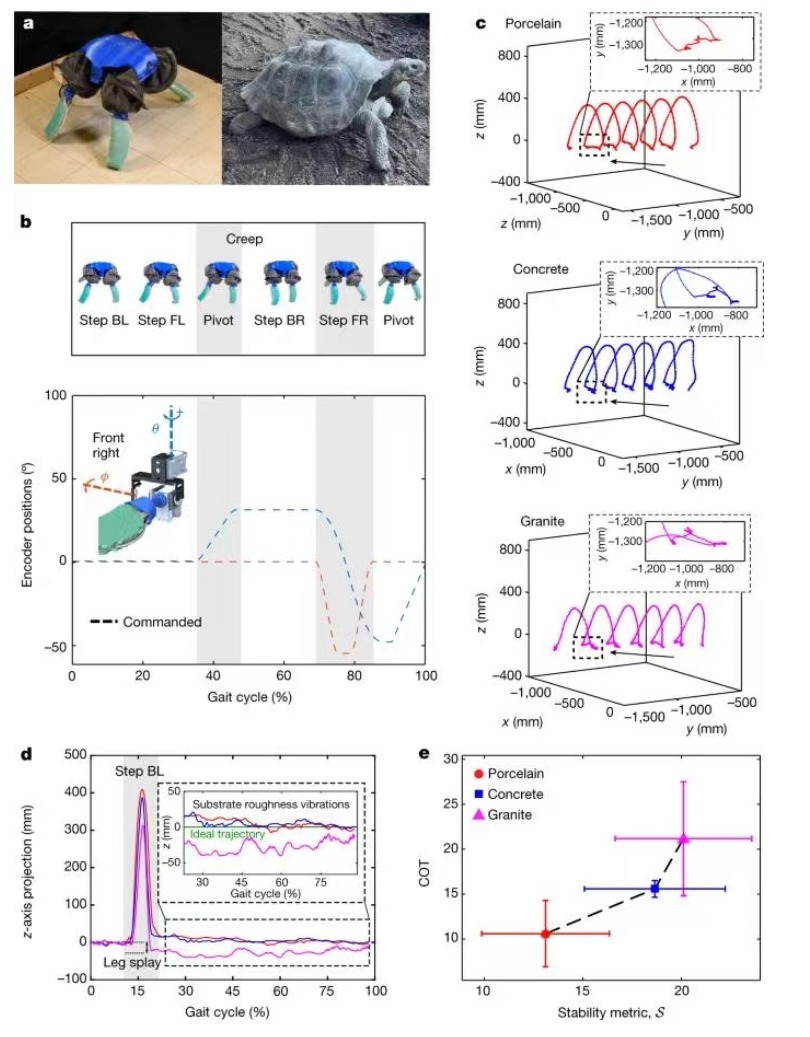
圖3:行走
作者選擇了類似于海灘海龜運動的爬行步態作為在過渡基質上的運動方式。當爬行時,ART躺在腹部,同時利用前后肢體串聯,略微向上抬起,并向后推,以實現向前推進(圖4a、b)。爬行可以分散機器人的重量,減輕災難性的滑行,并防止在運動過程中被困住。通過爬行,ART能夠成功穿越兩種過渡地形,其COT值比在陸地上爬行時高出140%。作者還做了基質和ART的組成材料之間進行了摩擦試驗,以解釋爬行時的COT升高。結果顯示,外殼的COT與靜態摩擦系數(μ)之間呈正相關,而肢體材料的COT與μ之間呈負相關(圖4c),這表明支配COT的主要力學因素是ART的甲殼沿基質的滑動。
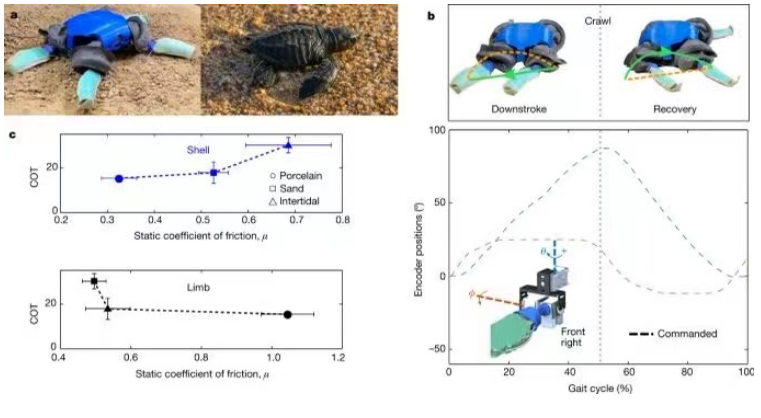
圖4:在過渡基板上爬行
作者將ART在水中、陸地上(圖5a,b)和過渡基質上的運動策略結合起來,創造了一個從陸地到水生的過渡路線(圖5c)。過渡地點由一個海洋入口組成,那里有堅硬的鵝卵石土壤,流向潮濕的沙質區域,然后變成布滿巖石和植物的淺灘。ART使用腿部模式和匍匐前進的方式來穿越堅硬的土壤部分。當ART接近水面時,基質變得更加飽和,它開始爬行,以確保穩定性,防止直立步態的集中點負荷深入到基質中。ART并沒有在開闊的水面上走很遠,在變形之前,它把四肢抬出水面。當它在淺水區僅部分被淹沒時,它依靠劃水來游泳。ART記錄了它在運輸過程中的環境,對其周圍環境造成的破壞很小。ART的最小COT性能與許多陸生和水生動物和機器人的性能進行了比較(圖5d)。由于專門針對多種環境,ART的表現與最先進的單模態水生或陸生機器人相近,在某些情況下甚至超過了后者。最重要的是,ART可以在非結構化的環境中過渡,同時保持與單模態機器人相當或更好的性能。
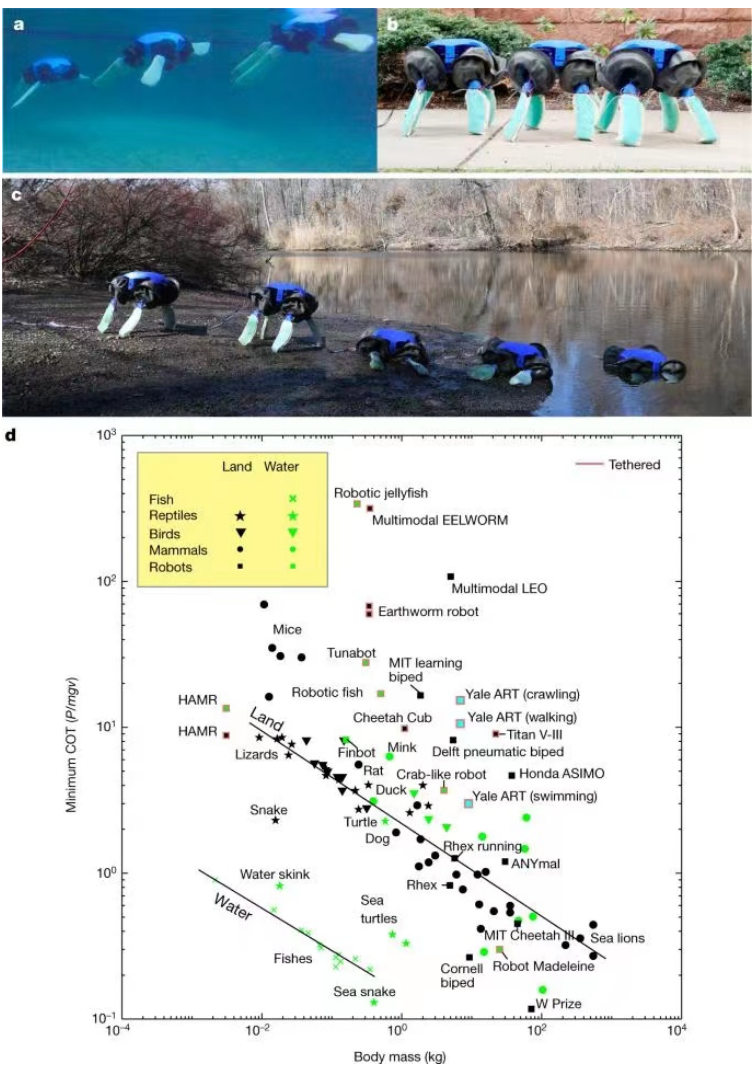
圖五:實況情景模擬
小結:在非結構化的動態環境中,例如陸地到水的過渡,作者發現將身體形狀和行為視為可以調整的變量的機器人設計可以提高效率。更廣泛的含義是,未來的機器人可以使用自適應形態發生來專業化,而不僅僅是一個環境,而是多個環境。













