
 資訊
資訊


兩種類型的“機器人”駕駛:自動駕駛和DARPA機器人比賽
但是人形機器人駕駛汽車的研究也是有很重要的意義的:2015年在美國舉辦的DARPA機器人挑戰賽里就有一項機器人充當司機駕駛吉普車的任務。小編私以為,研究人形機器人可以提升人形機器人的功能性,駕駛作為一個需要綜合多方面因素的任務(集合機器人設計,運動控制,人工智能算法等),可以很好的作為一個特定的研究課題來提升人形機器人的綜合性能;另外,研究人形機器人駕駛還將成果轉移到開發相應的機械臂或者機械腿,來為肢體有殘缺的人士提供可靠的功能性的智能義肢,讓他們能夠擁有和其他人一樣的生活和運動能力。

呆萌的老司機Musashi人形機器人
近期來自日本東京大學的研究團隊基于他們之前的人形機器人的研究,研發了一款用于駕駛汽車的人形機器人司機,并將研究成果刊登于國際機器人期刊《IEEE機器人與自動化雜志(Robotics and automation magazine)》,論文信息請看文末。這位機器人老司機名叫Musashi,不同于大多數人形機器人依靠關節電機驅動,Musashi被設計為具有像人一樣的肌肉-骨骼結構。他全神具有74塊人工肌肉,以及39個關節(不包括手部的關節)。而本研究的亮點也就是盡量模仿人類的動作和功能來實現機器人的自動駕駛。(東京大學的人形機器人團隊曾經于2017年刊登一篇《科學機器人學》(Science Robotics)封面文章,詳細講解了他們的“肌肉-骨骼”人形機器人系統設計,感興趣的可以參考文末的論文鏈接。)
我們先來欣賞一下“機器人老司機”的一些鏡頭!文末附有完整的視頻。在下一部分會為大家介紹如何設計以及實現人形機器人駕駛。
單手玩兒方向盤,不安全噢!
雙手轉方向盤,這才是正確操作吧!
踩油門
細節動作:擰鑰匙,拉手剎,打轉向燈

后視鏡識別人
培訓完成,老司機上路啦!
二. 類人機器人的“骨骼肌肉”系統設計以及控制
“肌肉-骨骼”機器人Musashi模仿人類的身體結構設計和制造,具有冗余的傳感器和柔性的身體結構。這些特性非常適合在復雜的環境中交互,例如在狹小的汽車中駕駛的行為。研究者期望設計的機器人能夠坐到汽車座位中,并且可以用腳踩剎車和油門,同時可以用雙手操作方向盤。為了實現上述的目的,研究者需要從硬件和軟件等多個方面綜合設計這款機器人,具體包括:1. 機器人身體比例;2.機器人身體的柔性;3. 冗余傳感系統和一個可以控制機器人“智能系統”。
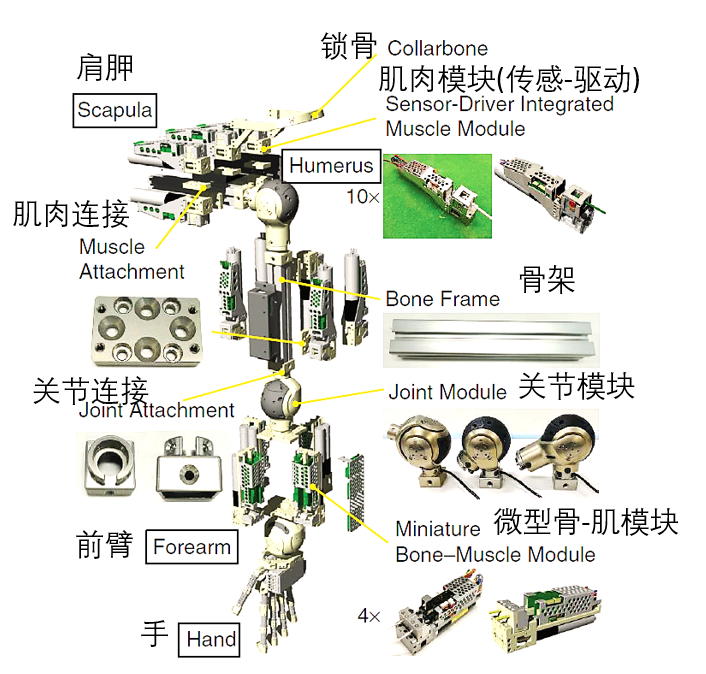
研究者對Musashi的肌肉模塊驅動器進行了重點設計和研發。柔性的“人工肌肉”是本研究中的硬件核心所在。肌肉模塊是由電機通過滑輪繞線驅動,為了讓機器人有一定的自體柔性,研究者們在每一個“人工肌肉”末端添加了一個非線性彈性單元(NEU)。非線性彈性單元由一個纖維增強的彈性圈充當,自身具有柔性,非常適合于環境交互。每一個肌肉驅動單元都含有可以測量肌肉張力,肌肉溫度以及肌肉長度的傳感器。肌肉模塊連接到骨架上,非線性彈性單元連接到肌肉末端。像人類一樣,Musashi的關節由一對肌肉模塊以對抗(antagonistic)的形式安裝驅動。

驅動單元設計
機器人的手臂結構如圖,Musashi的手臂基本上是按照人類的手臂進行設計。并且進行了模塊化設計和組裝。它的其余部分(例如腿部)等需要肌肉驅動的關節都可以利用模塊化設計組裝。在機器人的每一個關節里包含有位置傳感器,IMU等傳感器,能夠讀取到每一個關節的角度和姿態。
機械手模塊化設計說明

變剛度手臂
為了盡可能的模仿人類駕駛員的特性,研究者沒有采用3d掃描傳感器,而是在Musashi的頭部具有兩只可動2維攝像機充當眼睛,可以左右和上下旋轉,主要作用是采集圖像信息用于識別。
Musashi的手指采用彈簧柔性結構設計。當兩邊線都收緊式,手指處于大剛度狀態。這款機械手在沖擊下不會被損壞,另外在指尖部位和手掌部分都有用來檢測接觸的壓力傳感器。
Musashi的足部有著6維力傳感器,分別分布在腳趾和腳后跟處,可以全面感知腳受到的力的大小和方向。
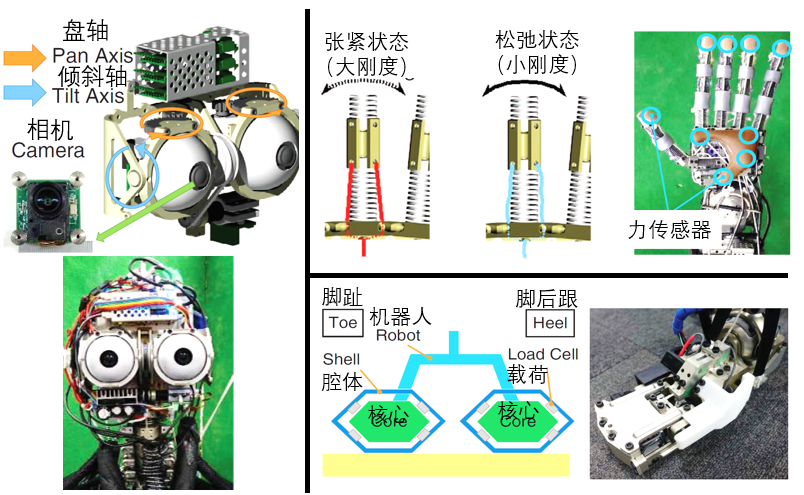
細節設計:眼部設計,變剛度機械手,足部傳感
借助于高度擬人化的硬件設計,Musashi可以實現以下功能和動作。首先它可以完美的坐到一部小型家用電動車中。可以通過頭部和眼球的轉動識別周圍的環境,例如通過后視鏡的反射可以識別人類;柔性機械臂和機械手可以抓握方向盤并且進行轉向操作。

基本動作和功能:后視鏡人像識別和雙手轉方向盤
另外Musashi也可以完成例如擰車鑰匙,以及拉手剎等在駕駛過程中一些必備的,看似簡單,實際對大多數機器人來說比較難以在狹小空間完成的基本動作。
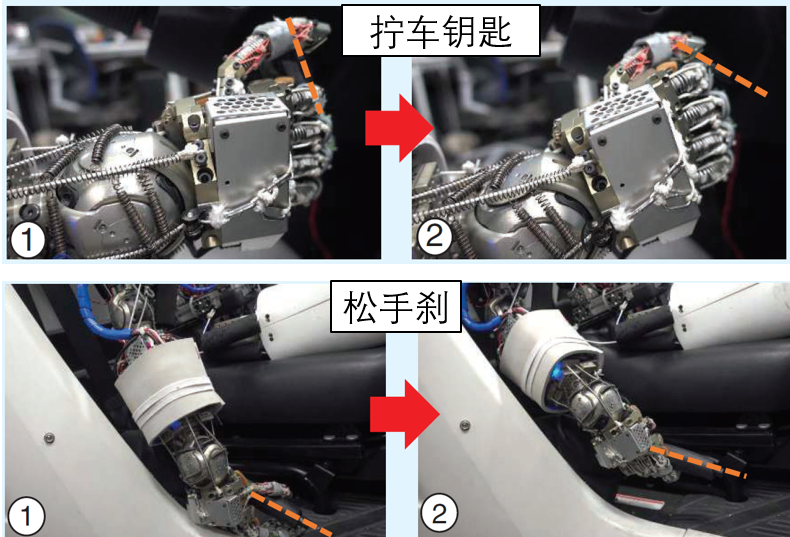
基本動作:擰車鑰匙和拉手剎
借助于足部的傳感器和腿的設計,Musashi可以實現踩油門和踩剎車的功能。另外當足部上方被剎車油門卡住后,力傳感器可以檢測出,從而讓Musashi做出反應,避開剎車油門的干擾。

基本動作:踩油門,踩剎車
在具備了柔性的身體結構和冗余傳感信息,為了實現機器人駕駛汽車的功能,研究者們采用一種基于機器學習(learning based)的運動生成,基于機器學習的識別,以及基于快速反射弧的控制方法,詳細的機器學習算法請參照具體論文。
研究者規定了一些基本的駕駛汽車的動作,將他們分為兩種類別,靜態行為和動態行為。靜態行為指的是轉方向盤,研究者用在線學習的方式,訓練機器人掌握操作方向盤的行為,圖中顯示出了方向盤角度和肌肉張力隨著時間的變化規律。
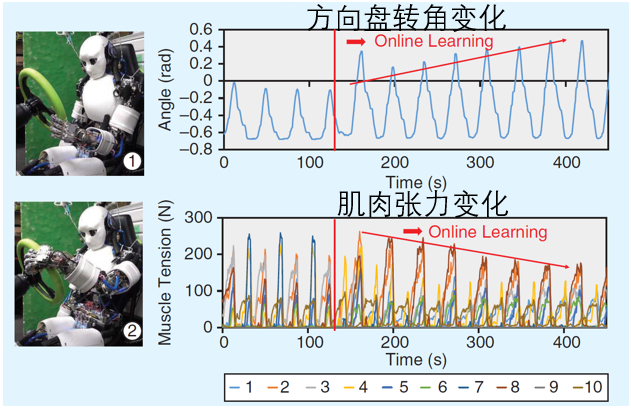
轉方向盤在線機器學習
踩油門和剎車是需要機器人做出快速響應的,例如在紅綠燈狀態下的啟動和剎車,以及在前方有行人時的剎車。研究者采用離線學習的方式來訓練機器人的動態響應。

踩油門訓練
在識別部分,像人類駕駛員一樣,研究者主要利用機器學習訓練識別了視覺和聲音信息,通過訓練,可以識別物體信息和聲音信息,例如,汽車,人,交通燈,以及喇叭聲等。研究者進行測試的場地是在車人非常稀少的街道上。
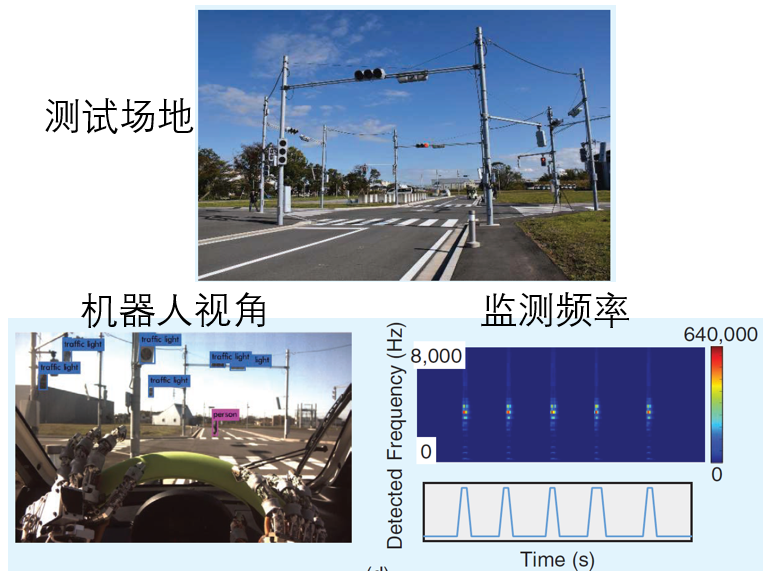
測試場地和機器人視覺識別
Musashi駕駛一輛小型改裝的電動車進行試驗。其中,能源和計算機控制中樞都被安裝于車廂尾部,另外還包括一個無線通訊模塊。為了安全起見,該車輛的電機扭矩被限制在5Nm之內,同時有一個應急按鈕以防止出危險。

駕駛汽車上配置電源和計算機
Musashi可以通過簡單的反射弧控制算法來對外界做出反應。研究者展示了一個很經典的場景,即在車輛前方有人或者汽車通過時,快速踩下剎車做出反應。基于Musashi的識別系統,它可以有效地識別在前方通過的人,以及即將到來的汽車,并做出反應。研究者指出,為了讓機器人的控制系統更加智能,在更多的環境中去訓練機器人的識別模型時非常有必要的。

駕駛過程中的鳴笛聲或者人類檢測
另一個測試場景是讓Musashi自動駕駛通過一個有著紅綠燈的十字路口。在這項實驗中,Musashi的駕駛速度非常的緩慢(5km/s)。當十字路口的等變為綠色時,操作人員對機器人發出轉彎的指令,Musashi可以駕駛小車用雙手實現90度的轉彎。整個過程持續大約2分鐘,相對來說比較緩慢和不流暢。

駕駛過程中的紅綠燈檢測
三. 總結與未來展望
雖然自動駕駛汽車要比用“人形機器人”駕駛汽車更為可靠,更舒適,更安全,但是小編相信,對于“人形機器人“的諸如此類的深入研究還是有很重要和深遠意義的。駕駛汽車這項任務將機器人束縛在一個極其復雜的環境中,需要機器人去操作方向盤,踩油門,拉手剎,撥轉向燈等。無疑來說是一項很有挑戰性的任務。進行相關的研究可以極大的促進”人形機器人“的發展。
本文的研究者指出,當前的研究還有很多方面需要改進,例如在腳踏板的操作和方向盤的操作方面,都不夠順滑,以及速度較慢,遠遠沒有辦法和人類進行比較。同時機器人的識別模型還需要進一步的完善和強化,以適應更復雜的環境。在未來的研究中,研究者會考慮讓機器人嘗試不同的汽車,從而進一步提升人形機器人的性能。
相關論文信息:
Kawaharazuka, K., Tsuzuki, K., Koga, Y., Omura, Y., Makabe,T., Shinjo, K.,Kawasaki, K. (2020). Toward Autonomous Driving byMusculoskeletal Humanoids: Study of Developed Hardware and Learning-basedSoftware. IEEE Robotics & Automation Magazine.
東京大學人形機器人論文:
Asano, Y., Okada, K., & Inaba, M. (2017). Designprinciples of a human mimetic humanoid: Humanoid platform to study humanintelligence and internal body system. Science Robotics, 2(13),eaaq0899.













