
 資訊
資訊
當你閉上眼睛之后,即使一片漆黑,但你還可以通過肢體的感觸,來感知這個世界,想象一下這是一種怎樣的體驗,
現在人工智能越來越發達,機器人也有同樣的能力了。
這個年代,是一個高科技的時代,機器人的發明已經不是什么新鮮的事情了,而且大多數的機器人都是通過電力驅動的。
科學家們發明的機器人都是以一種不靈活的冷冰冰形象出現,因為它們那看起來非常僵硬的身體無法靈活的根據環境來工作,所以這種機器人就被稱為是剛性機器人,但隨著科技越來越發達,它們正在積極轉型成為軟體機器人。
此前,機器人大多通過運動相機、激光雷達系統以及算法來獲取并生成環境三維信息。
但這種視覺系統對于現在的機器人新貴——軟體機器人來說似乎不太適用。

▲ 來自哈佛大學的軟體機器人
軟體機器人因骨骼驚奇、身體柔軟,可以穿梭于一般機器人難以觸達的地方,但是對于在這些「犄角旮旯」里面如何探知三維空間,如何對外界環境做出精確的建模卻一直是個問題。
一款新出的機器人,不需要用電就能使其移動,而是采用了一種折疊方式,這是怎么做到的呢?我們一起來看看吧!
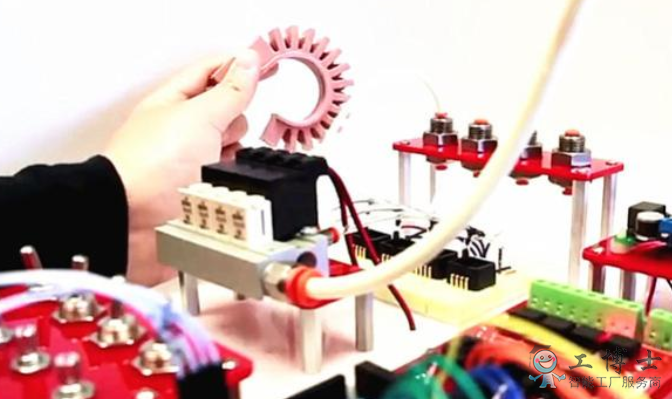
就在前段時間,哈佛大學的Wyss研究所像大眾展示了他們的一款軟體機器人,這個受折紙啟發發明的軟體折疊機器人叫Rollbot,它的長相非常簡單,但它確確實實是一個名副其實的機器人。

除此之外它的體型非常小,就是一張小卡片,可是一旦將這張小卡片放到桌面上,它就能折疊往前跑。這是因為它是由一種叫液晶彈性體的活性材料制成的,與熱表面接觸時就會折疊成五角輪自動前進,所以紙片能夠自己動起來不是因為活見鬼了,而是有一定的科學原理的。
紙片下面的板子也不是一塊普通的板子,它的溫度達到了200攝氏度,這是為了給紙片提供一個熱環境。紙片通過折疊往前走,又是如何控制自己的運動方向呢?其實是有一定的規律的。

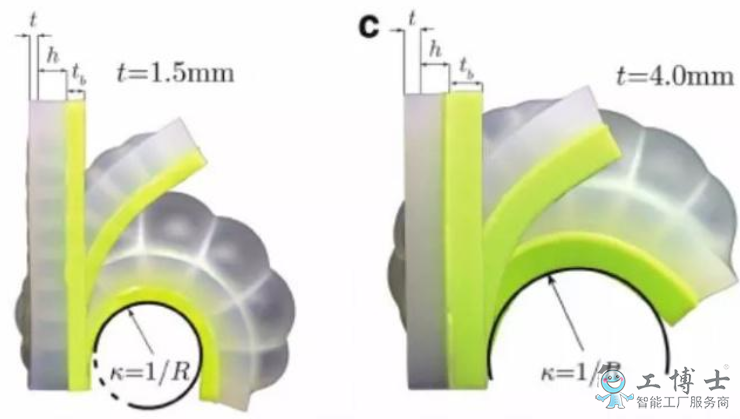
因為紙片的折疊位置是一個個在不同的溫度下可以進行折疊的3D打印軟鉸鏈,其一側在與熱表面接觸時就可以折疊,然后推著輪子轉向下一側,只要離開熱表面,就恢復成原狀,如此循環下去。
這樣一個完整的操作過程實施下來,研發人員就可以對溫度、鉸鏈的彎曲程度、折疊方向進行系統的編程,然后來控制紙片的運動形式,這樣就可以按照一定的軌跡前進了。
大多數的軟體機器人其實都需要依靠外部電源來進行控制的,但Rollbot卻走了一個新路線,完全摒棄掉電線,不用電就能靈活地改變自身的形狀來適應環境,這將為以后的機器人事業打造出了一條很有前景的道路。

太空探索,救援等多功能軟體機器人
據哈佛大學約翰·A·保爾森工程與應用科學學院(下稱SEA)官網和Tech Explorist報道,6月2日,哈佛大學約翰·A·保爾森工程與應用科學學院(SEA)的研究人員開發出了最新型的軟體機器人,它可以應用于太空探索、搜索和救援系統、仿生學、醫學手術與康復等領域。
這款新型機器人由空氣驅動,并用一個輸入器代替了多個控制系統,使機器人在不受約束的同時,還能簡化控制、減輕重量。

圖片來源:Bertoldi Lab/Harvard SEAS軟體機器人被業內視為機器人技術的未來,相較于硬性機器人而言,它有可擠入狹小空間、碰撞后能盡快恢復等優點。
但目前來說,軟體機器人在設計上仍有許多局限。其中最大的一個問題就是,軟體機器人通常需要拴在輸入線上,這意味著它們必須通過提供壓縮空氣的管道和控制其系統的電線與外部設備相連。但這些管道和電線在很大程度上束縛了軟體機器人功能的發揮。
而如今哈佛大學研發的這款軟體機器人,則可將其驅動過程大大簡化,從而解決這一難題。
該機器人被設計成十字形,有四條“腿”,每條“腿”都相當于一個執行器,各執行器上含有八個由細小通道連接的氣室,頂部則留有七條接口,用于接通輸送壓縮空氣的管道。

圖片來源:Bertoldi Lab/Harvard SEAS這項研究論文發表在《軟體機器人學》雜志上。
哈佛大學應用力學教授卡蒂婭·貝爾托迪(Katia Bertoldi)在論文中表示,該項研究首次提出了這種基于流體粘性現象來制造軟體機器人的方法。使用該方法的軟體機器人其驅動結構將比以往的更為簡單、容易。
該方法通過使用不同直徑的管子來控制空氣在軟體機器人裝置中的移動速度,即一次性通過其中一個管泵輸送相同數量的空氣,管的大小將決定空氣流動的方式和位置。
比如將三根直徑為0.79mm、長度相同的管子接在機器人上,再接通一根直徑為0.38mm的長管輸送氣流。它其中的一條“腿”就能充滿空氣并彎曲起來,而另外三根上接通的管道由于直徑更粗并且長度相同,因此輸送壓縮空氣的時間較短,其余三端可幾乎同時鼓起落下。

圖片來源:Bertoldi Lab/Harvard SEAS不同長度的管子分別接在機器人頂部的接口上,不同的粗細、長度和接通方式都會對機器人的運動方式有所影響。
例如將四條直徑均為0.38mm,長度分別為78.6cm(輸入空氣)、10cm、43.7cm及122.4cm的管子配置于該機器人上,并將這些管子按順序連接起來,接通壓縮空氣。
那么該機器人的執行器最終會按照設定好的順序,即右-上下-左的順序依次進行彎曲,從而向前爬行。

圖片來源:Bertoldi Lab/Harvard SEAS如果將管子接口的位置和次序調換一下,執行器充氣的順序就會發生變化,利用這一方式,該機器人即可實現不同方向的運動。
此外,由于每個執行器的大小、厚度不盡相同,在輸入等量空氣時,彎曲的程度也不同,因此運動的距離也會有所差別。
但由于輸入壓縮空氣的速度與量是不變的,調控管子就能夠決定空氣輸送的位置和順序。因此它不再需要復雜的空氣壓縮計算和控制。
圖片來源:Bertoldi Lab/Harvard SEAS研究人員尼古拉斯·瓦西奧(Nikolaos Vasios)表示,在這項研究之前,人們還不能在沒有獨立控制每個驅動器的情況下,通過單獨的輸入線、壓力源以及復雜的驅動過程來構建軟體機器人。
該項目是人們朝著完全不受約束的簡單驅動軟體機器人研發邁出的重要一步。
在科技的不斷進步下,軟體機器人的結構會不斷完善,在未來的發展空間越來越廣。













